From Blandcorp:
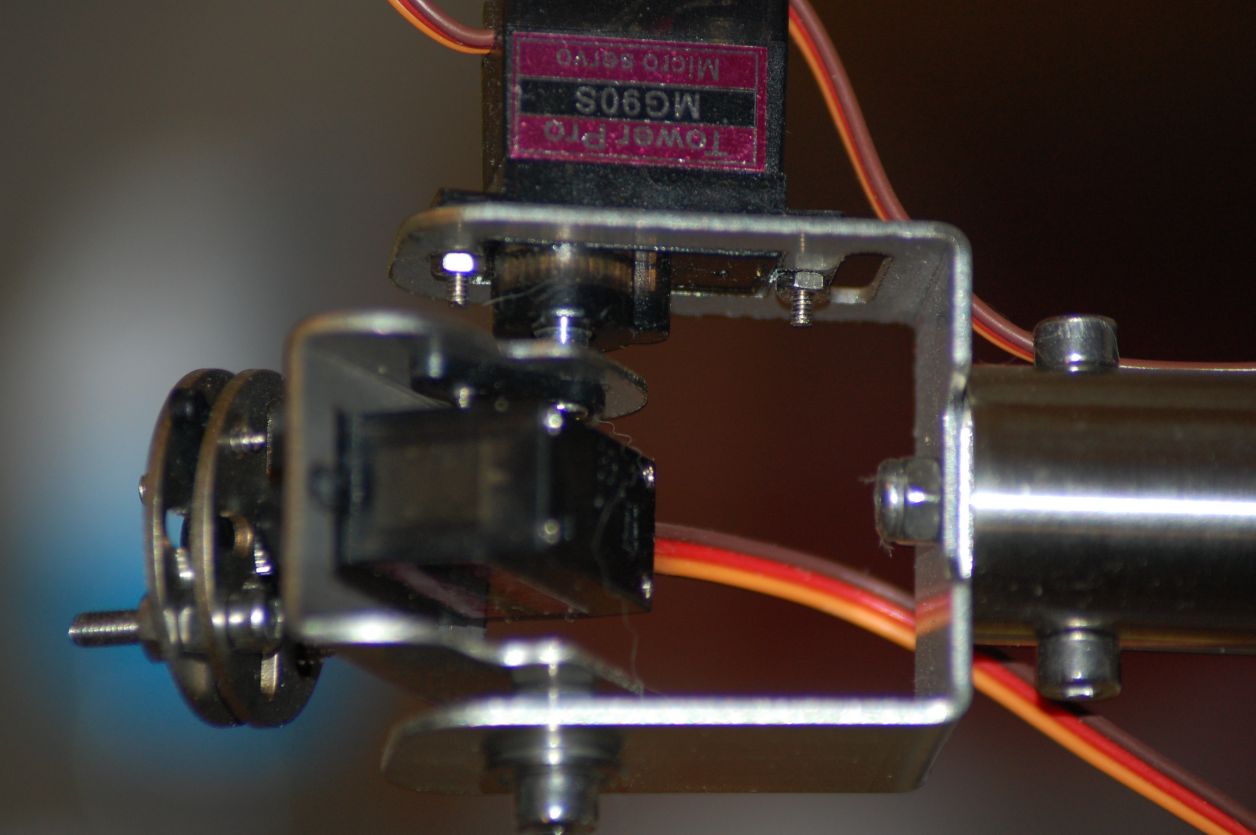
dz: (I assume this is the second to last picture): you seem to be measuring the distance between where the forearm pivots and where that linking rod connects to the elbow. I'd like the distance between where the forearm pivots and the axis of the forearm twist, so a length perpendicular to the one in the picture.
d': (distance between the wrist pivot axis and forearm twist axis) I don't see where you measure this, but from one of your pictures it seems like it might be as good as 0, so that's good.


The minimum angle is approximately 10 degrees - I can't get a more accurate reading.

I'd estimate the maximum angle to be about 150 degrees.

15 cm from Joint 1 (linking the upper arm to the lower arm) to the center axis of Servo 4.

4 cm from Joint 1 to Joint 2, linking the lower arm to the connecting rod. The connecting rod is 11cm long from Joint 2 to the center axis of Servo 2.
If it's the one I think it is, it's exactly 0.

 |
| Distance between where the forearm pivots and where that linking rod connects to the elbow: 3cm |
Distance between where the forearm pivots and where that linking rod connects to the elbow: 3cm

Distance between where the forearm pivots and the axis of the forearm twist: 1.5cm

The horizontal distance is difficult to measure. I decide on 3cm.
The distance from the base to the axis of servos 1 and 2 (opposite) is about 8cm.
Let's try a tentative, simplified Kinematic diagram:
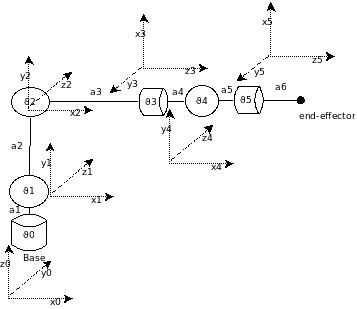
Now, onward to Part 3 ...
No comments:
Post a Comment